Termovize
Termovize je optický přístroj pracujíví v určité části spektra infračerveného záření (které je pak část spektra elektromagnetického záření). Jedná se o úsek infračerveného spektra v oblasti cca 1 až 14 µm, přičemž nejčastěji jsou používané tzv. LWIR termovize, kde optickým snímačem je tzv. mikrobolometrické pole a spektrální rozsah takového přístroje je potom přibližně v rozsahu vlnových délek 7 až 14 µm. Princip termovize i bolometru je diskutován dále.
Termovize se používá především v oblasti bezdotykového měření teploty, kvalitativní analýzy teplotních polí (typickým příkladem takové aplikace je například diagnostika zatékání do plochých střech) a jako noční vidění (záchrana a pátrání po osobách či po zvířatech, viz např. naše služba Vyhledávání srnčat před senosečí ).
Terminologie: Správné označení přístroje o němž je v tomto článku řeč dle ISO 18434-1 je "IČT termokamera", tedy infračervená termografická kamera. V praxi se však používá termín buď termokamera, nebo právě termovize. Slovo "termovize" vychází z anglického názvu ThermoVision, tj. z obchodního označení historického produktu společnosti Agema, který byl natolik úspěšný, že se toto označení vžilo v praxi pro označení celé kategorie výrobů. Snímek pořízený termovizní kamerou pak nazýváme termogram.
Obsah článku
- Termovize - úvod do problematiky a princip funkce
- Kvantitativní aplikace termovize
- Kvalitativní aplikace termovize
- Termovize při pátrání po pohřešovaných osobách a noční vidění
- Aplikace termovize v oblasti leteckých prací
Termovize - úvod do problematiky a princip funkce
Termovize (jak již víme, též termokamera) je optický přístroj pro:
- bezdotykové měření teploty (kvantitativní přístup) - pro roto využití je třeba mít termokameru s
- noční vidění a nebo
- vizualizaci teplotních polí (kvalitativní přístup).
Princip termovize je založen na snímání tepelného záření, které vyzařují měřené objekty, viz Stefanův–Boltzmannův zákon a Planckův vyzařovací zákon. K tepelnému záření dochází vlivem pohybu atomárních a subatomárních částit v objemu tělesa v blízkosti povrchu. Změna pohybu elektricky nabité částice vede k emisi fotonu, energie a tedy i frekvence emitovaného fotonu je dána charakterem pohybu částice, hmotností částice, ale především její kinetickou energií. Konetická energie částice je pak uměrná povrchové těplotě objektu.
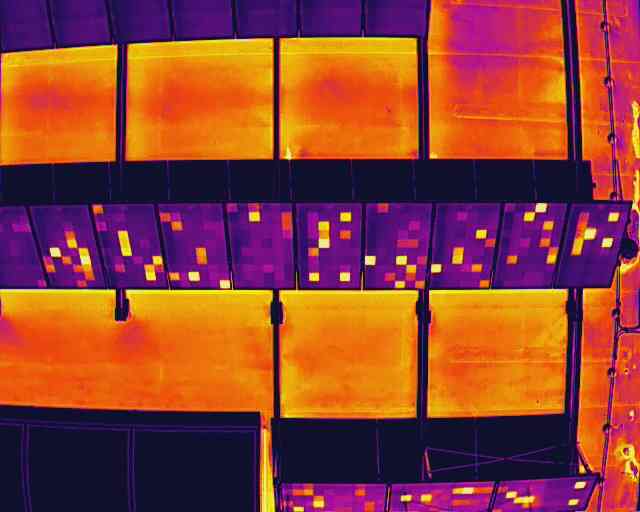
Termogram fotovoltaické elektrárny, pořízeno s dronem s termovizí DJI H20T.
Z toho pak vychází, že u tělesa v termodynamické rovnováze platí již zmiňovaný Stefanův-Boltzmannův zákon, z něhož vyplývá, že celková energie vyzářená ve formě tepelného záření je úměrná čtvrté mocnině povrchové teploty snímaného povrchu. Koeficientem úměrnosti je tzv. emisivita. Emisivita je jeden ze dvou parametrů, tím druhým je tzv. odražená zdánlivá teplota, který je třeba nastavit při kvantitativním měření tak, aby termovize byl schopna vyhodnotit povrchovou teplotu. Termovize totiž neměří teplotu přímo, ale stanovuje ji ze zadaných parametrů a intenzity tepelného záření. Parametry měření vyplývají z rovnice termografie a jsou dva hlavní, tj. emisivita a odražená zdánlivá teplota a pak tři parametry, které modelují vliv atmosféry. První dva parametry, tj. emisivita a odražená zdánlivá teplota jsou hlavní a jejich nastavení je nezbytné pro každé kvantitativní měření.
Termovize neměří teplotu přímo, ale stanovuje ji ze I) změřené intenzity tepelného záření (zaznamenáno pomocí optického senzoru) a II) zadaných parametrů měření. Parametry měření jsou dva hlavní. tj. A) emisivita a B) odražená zdánlivá teplota.
Pokud si při snímání vystačíme s rozdíly intenzity tepelného záření, tj. pokud se jedná o tzv. I. kvalitativní měření, nebo o II. aplikaci "search and rescue" (záchrana či pátrání po osobách), není nastavení parametrů měření nezbytné a stejně tak si vystačíme s nekalibrovanou a dokonce neradiometrickou termovizi (neradiometrická termovize stanovení teploty neumožňuje vůbec). V praxi takové snímkování (vyhýbáme se použití slova "měření") dokáže detekovat přítomnost závady, nedokáže ale stanovit stupěň závady.
Termovize neměří teplotu přímo, ale stanovuje ji ze I) změřené intenzity tepelného záření (zaznamenáno pomocí optického senzoru) a II) zadaných parametrů měření. Parametry měření jsou dva hlavní. tj. A) emisivita a B) odražená zdánlivá teplota.
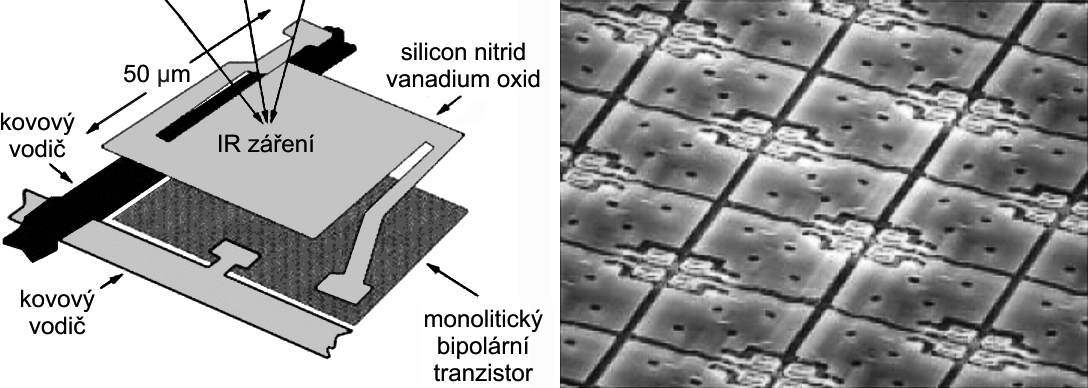 |
| Mikrobolometrické pole je typ tepelného senzoru pro termovize. Pracuje na principu vlastního ohřevu vlivem dopadajícího tepelného záření z povrchu objektu, který je termovizí snímán (měřen). Mikrobolometrické pole se skládá z jednotlivých mikrobolometrů, které odpovídají pixelům termovize. Standardní rozlišení termovize pro dron je dnes 640x512 pixelů. |
V praxi je u 99% termovizí použit jako optický senzor tzv. mikrobolometr, respektive mikrobolometrické pole, které se skládá z jednotlivých mikrobolometrů. Počet mikrobolometrů pak odpovídá počtu tzv. pixelů termovize. Tj. například termovize s rozlišením 640x512 px pak nabízí celkově 640x512 = 327.680 samostatných měřicích bodů, které jsou schopné stanovit povrchovou teplotu z oblasti, která je na mikrobolometr promítnuta optikou termovize. Termovize založené na mikrobolometru pracují prakticky vždy v tzv. LWIR pásmu (tj. v pásmu 7 až 14 µm).
O problematice termovize přednášel jeden z našich kolegů Jan Sova na ČVUT v rámci přednášky Ing. J. Sova: Fyzikální souvislosti bezdotykového měření teploty [Fyz. čtvrtek FEL ČVUT] (záznam přednáška ze dne 10. 3. 2022). Slide z přednášky jsou k dispozici online:
Využití termovize v souvislosti s dronem se věnujeme v samostatém článku Dron s termovizí. Použitá termovize je principiálně stejná jako v případě ruční radiometrické kamery, ale je uzpůsobena pro použití s dronem. Vedle mechanického a konstrukčního uzpůsobení (tj. tak, aby termokamera mohla být nesena na gimbálu) jde o uzpůsobení funkční. Tím je myšleno jednak uzpůsobení funkční (možnost ovládání přístroje RC ovladačem, optický či digitální zoom, funkční propojení s RGB kamerou apod.). V současné době jsou termovize pro drony buď integrované na dronu jako například v případě dronu s termovizí DJI Mavic 2 Enterprise ADVANCED a nebo se jedná o tzv. multimakamery, které jsou vedle termovize (a RGB kamery) vybavena dalšími senzory. Například termovize DJI H20T (na obrázku) je vybavena následujícími senzory:
- termovize s rozlišením 640x512px, 2x optický zoom, ekvivalentní ohnisková vzdálenost 53 mm
- termovize s rozlišením 640x512px, 8x optický zoom, digitální zoom termovize až 32x, ekvivalentní ohnisková vzdálenost 196 mm
- RGB kamera s rozlišením 4 Mpx RGB a 20x optickým zoomem, režim nočního vidění (starlight sensor)
- RGB kamera s rozlišením 2 Mpx, režim nočního vidění (starlight sensor)
- laserový dálkoměr (s rozsahem měření 3 až 1200m). V kombinaci s dronem DJI M300 RTK nabízí tato sestava vůbec nejpokročilejší dron s termovizí na trhu.

Termovize s označením DJI H20T pro profi dron DJI M300 RTK.
Kvantitativní aplikace termovize
Při kvantitativním přístupu se s pomocí termovize snažíme o co nejpřesnější stanovení povrchové teploty měřených objektů, protože nechceme jen stanovit přítomnost závady, ale také stanovit stupeň závady, přičemž stupeň závady je pak dán pomocí
Typickou aplikací s kvantitativním přístupem je diagnostika rozvodů vysokého napětí. Termovize je zde použita pro stanovení oteplení vodiče elektrické fáze s poruchou ve srovnání s vodičem elektrické fáze bez poruchy. Takto stanovený rozdíl je s pomocí tzv. klasifikačního schématu srovnán a je stanovena závžnost otepelní a případně i stupeň poruchy. Pro ilustraci je příklad klasifikačního schématu uveden ve formě srovnávací tabulky níže. Další typickou aplikací s kvantitativním přístupem je diagnostika fotovoltaických elektráren.
| Stupeň závady* | Velikost oteplení** | Nápravné opatření |
| 0. stupeň | 0-10 °C | bez opatření |
| 1. stupeň | <10 °C - 40 °C | sledovat |
| 2. stupeň | <40 °C - 70 °C | oprava do 14 dnů |
| 3. stupeň | <70 °C | okamžitý zásah |
|
* Uvedené klasifikační schéma je jen orientační. Klasifikační schéma je třeba přizpůsobit danému provozu. ** Oteplení měřené fáze se buď stanovuje vůči fázi, která je vpořádku a nebo je oteplení stanovené vůči teplotě vzduchu (k tomu je ale třeba přizpůsobit teplotní intervaly pro jednotlivé stupně) |
||
Pro kvantitativní použití je nezbytná radiometrická termovize, s platnou kalibrací a je nezbytné správně a co nejpřesněji nastavit dva hlavní parametry měření, tj. "emisivitu" a "odraženou zdánlivou tepotu".
Kvalitativní aplikace termovize
Kvalitativní aplikace (termín vychází z ISO 18434-1) je takové použití termovize, kdy cílem není (co nejpřesnější) stanovení povrchové teploty, oproti (kvantitativním aplikacím), ale vizualizace existence teplotních rozdílů, přičemž není stanovena (zjištěna) ani velikosti těchto teplotních rozdílů, ale pouze jejich existence.
Při kvalitativním přístupu jsme schopni stanovit přítomnost závady, závadu lokalizovat a v některém případě stanovit i jejích rozsah (například plocha, do které zatéka, prostorový rozsah tepelného mostu apod.), nejsme ale schopni stanovit stupeň závady. Tj. například u přechodového odporu na vedení vysokého napětí jsme schopni stanovit lokální oteplení, ale nikoli závažnost tohoto oteplení. A protože je stanovení velikosti oteplení nezbytné (dle velikosti oteplení může být stav "bez závady" až po "kritické"), nelze pro tuto aplikaci použít kvalitativní přístup (ve skutečnosti je měření oteplení elektrických rozvodů typickou aplikací pro kvantitativní přístup, jak bylo uvedeno v předchozí kapitole).
Pro tyto aplikace samozřejmě postačuje neradiometrická termovize, nekalibrovaná a parametry měření (emisivita a odražená zdánlivá teplota) se nenastavují. Pracujeme s pojmem "zdánlivé teploty" (termín opět viz ISO 18434-1), kdy je již z termínu zřejmé, že se nejedná o skutečnou teplotu.
Termovize při pátrání po pohřešovaných osobách a noční vidění
Při pátrání pro pohřešovaných osobách, vyhledávání zvěře apod. se využívá teplotní rozdíl mezi vyhledávaným objektem a teplotou okolí. Rozdíl teplot je pro dosažení správných výsledků nezbytný a proto je použití termovize při pátrání po pohřešovaných osobách a nebo zvěři prakticky nemožné za slunného dne, naopka výborně funguje brzy z rána, před východem Slunce.
Typicky je nezbytnost dosažení těchto podmínek patrá v aplikaci při záchraně srnčat před senosečí. Zde se s pátráním po srnčatech začíná brzy z rána (např. první vzlet okolo 5:00) a to tak, aby byla všechna srnčata v dané lokalitě nalezena do okamžiku, než je půda i kamenivo prohřáté slunečním zářením. Pokud k prohřátí okolí dojde (záleží na okamžiku východu Slunce a oblačnosti), je pak již prakticky nemožné další srnčata nalézt, neboť nahřáté kamenivo i půda budou vytvářet obrovské množství "flešně pozitivních" nálezů. Totéž samozřejmě platí i při pátrání po pohřešovaných osobách.
Vedle nočních a brzkých ranních časů (tedy v období, kdy Slunce nesvítí), jsou pro aplikace pátrání vhodné dny, kdy je silně zataženo a teplota vzduchu není vysoká. Tj. vedle zimních dnů jsou to některé jarní a podzimní dny. Intenzitu slunečního záření nemusíme ověřovat luxmetrem, ale po pár "létání" je pilot schopen odhadnout, zda bude použití dronu s termovizí pro tuto aplikaci v daný čas s možností dosažení uspokojivého výsledku, nebo ne.
Pro tyto aplikace samozřejmě postačuje neradiometrická termovize, nekalibrovaná termovize a parametry měření (emisivita a odražená zdánlivá teplota) se nenastavují.
Aplikace termovize v oblasti leteckých prací
Vybrané aplikace pro dron s termovizií (a zároveň letecké práce které nabízíme):
- Termovizní diagnostika plochých střech
- Termovizní diagnostika mostních konstrukcí
- Termovizní diagnostika teplárenenských celků a produktovodů
- Vyhledávání srnčat před senosečí
- Termovize fotovoltaických elektráren
Další odkazy k problematice termovize:
- MIL-STD-2194 - MILITARY STANDARD: INFRARED THERMAL IMAGING SURVEY PROCEDURE FOR ELECTRICAL EQUIPMENT (12 FEB 1988)
- IEC-TS-62446-3 - Photovoltaic (PV) systems - Requirements for testing, documentation and maintenance - Part 3: Photovoltaic modules and plants - Outdoor infrared thermography
- ISO 18434-1 - Condition monitoring and diagnostics of machines — Thermography — Part 1: General procedure
- 5 důvodů proč koupit dron s termokamerou DJI MAVIC 2 ADVANCED (eko-drony.cz)
- Profesionální dron s (termokamerou) DJI M300 RTK (eko-drony.cz)
- ASTM C 1153 - Practice for Location of Wet Insulation in Roofing Systems Using Infrared
- Archaeological Aerial Thermography in Theory and Practice, Cambridge University Press
- Guidelines for Thermographic Inspection of Concrete Bridge Components in Shaded Conditions, Transportation Research Record: Journal of the Transportation Research Board
- Use of aerial thermography to reduce mortality of roe deer fawns before harvest, PeerJ
- Fyzikální souvislosti bezdotykového měření teploty, Jan Sova, přednáška v rámci fyzikálních čtvrtků
- NDT TECHNIQUES APPLIED FOR THE INSPECTION OF FLARE STACKS
- ČSN EN 13187 - Tepelné chování budov – Kvalitativní určení tepelných nepravidelností v pláštích budov – Infračervená metoda
-
ČSN 73 0540-2 (730540) Tepelná ochrana budov - Část 2: Požadavky