DJI L3 je lidar, který je určen pro použití s dronem DJI Matrice 400 (je potřeba nainstalovat upravený držák gimbalu, který je v balení s lidarem), který je použitelný jak pro laserové skenování, tak pro fotogrammetrii. Nacházíte se na stránce s návodem pro tento lidar, který obsahuje ale i obecné informace a přehledy k nastavení lidarů.

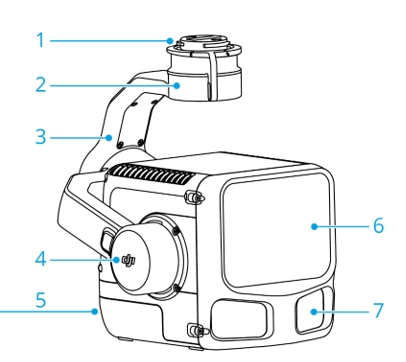
1. Konektor gimbalu - pro použití s dronem DJI Matrice 400 je potřeba speciální úchyt gimbalu (jinými slovy vyměnit držák gimbalu na dronu za ten, který je určen pro lidar DJI L3)
2. Motor otáčení gimbalu
3. Rameno gimbalu
4. Motor naklápění gimbalu
5. Konektor pro zasunutí CF express karty
6. Prostor snímače lidaru
7. 2x RGB kamery lidaru
K lidaru jsou k dispozici i výuková videa od výrobce - dostupné na QR kodu níže. Nebo na odkazu: https://enterprise.dji.com/zenmuse-l3/video

Grafy snímacího výkonu lidaru
Snímací dosah (osa označena "B", v metrech) při různé odrazivosti (osa označena "A", %) a vzorkovacích frekvencích je znázorněn v následujícím grafu.
* Maximální snímací dosah je ve výchozím nastavení 900 m. Když potřebujete dosah delší, kontaktujte oficiální podporu nebo autorizovaného prodejce.

Hustota mračna bodů při snímání lidarem
Když je překrytí mračna bodů 20 % a rychlost letu 15 m/s, hustota mračna bodů (B, v bodech/m²) v různých výškách (A, v metrech) při různých frekvencích vzorkování je ukázána na následujících grafech.

Chyba měření u lidaru
Obrázek ukazuje, jak se náhodná chyba (na ose označená "B", v milimetrech) pro různé vzorkovací frekvence mění se vzdáleností cíle (na ose označený "A", v metrech) při skenování objektu s 80% odrazivostí. Vyberte tedy vhodnou vzorkovací frekvenci a vzdálenost cíle, aby požadavky na přesnost byly splněny.

* Měřeno v laboratorním prostředí za níže uvedených podmínek. Vezměte v úvahu, že skutečné údaje se mohou lišit v závislosti na skutečných podmínkách.
Okolní teplota 25 °C
Cílová odrazivost 80 %
Centrální zorné pole a normální dopad
* Přerušovaná čára označuje náhodnou chybu, když vzdálenost cíle překročí maximální měřicí rozsah pro příslušnou vzorkovací frekvenci.
Možnosti použití a omezení LIDARu
Vyhněte se použití LiDAR v následujících případech, protože by to mohlo snížit snímací dosah a přesnost, způsobit šum nebo mezery v mračnu bodů.
• Snímání plně nebo vysoce odrazivých povrchů, jako je např. zrcadlo.
• Snímání vodních ploch nebo mokrých povrchů.
• Při snížené viditelnosti, např. při deštivém nebo mlhavém počasí.
• Lidar byl právě zapnut, a ještě se nezahřál.
• Cílová vzdálenost je do 10 m.
• Okolní světlo je příliš silné.
• Dochází ke zpětnému odrazu drobnými částicemi v ovzduší, jako jsou kapky deště, mlhy či oparu nebo částicemi prachu.
V situacích s výraznými výškovými rozdíly použijte vysokou vzorkovací frekvenci.
VAROVÁNÍ
• Tento produkt je klasifikován jako laserový produkt třídy 1 a je bezpečný za všech běžných podmínek. Abyste předešli možnému zranění, NEDÍVEJTE se přímo do optického okénka LiDAR ani ho nepozorujte přes optické zvětšovací přístroje, jako jsou dalekohledy nebo lupy.
• NEFOTOGRAFUJTE LiDAR během používání, mohlo by dojít k poškození snímače fotoaparátu.
• Když se sklon LiDAR blíží vodorovné poloze, může dojít ke snížení jeho výkonu, dosahu a přesnosti.
• Vypnutí barevného zobrazení RGB nebo snímání v noci může vést k abnormálním výsledkům modelování.
Nasazení lidaru DJI L3 na dron DJI Matrice 400
V prvním kroku "A" je potřeba vyměnit držák gimbalu/kamery, pokud jste tak již učinili, tak tento krok prosím přeskočte.
Po nasazení lidaru na dron a zapnutí dronu je potřeba lidar aktivovat, (v standardní aplikaci DJI Pilot 2, která je součástí ovladače ke dronu a je nainstalovaná již v základu). Po zapnutí postupujte dle pokynů na displeji - ovladač je potřeba připojit k internetu.

• Během přepravy nebo skladování sundejte Lidar, nebo jiné užitečné zatížení (kameru, termokameru apod.) z (držáku) dronu. V opačném případě se může zkrátit životnost nebo poškodit tlumicí zařízení.
• Chcete-li sundat lidar z držáku, je potřeba stisknout tlačítko na zámku, pootočit s páčkou a lidar/resp jeho horní konektor vysunout dopředu před dron
Nastavení lidaru DJI L3 v ovládací aplikaci DJI Pilot 2

1. Stav kalibrace IMU jednotky lidaru (před letem doporučujeme vždy zkalibrovat - je potřeba, aby dron byl v dostatečné výšce a v okolí bez překážek, dorn se při kalibraci pohybuje vpřed a vzad)
2. Nastavení lidaru/kamery (Klepnutím nastavíte parametry pro získání mračna bodů a záběry klasické kamery)
3. Nastavení režimu skenování (závěrka/nahrávání videa/nahrávání mračna bodů)
4. Galerie - Klepnutím otevřete galerii a zobrazíte nebo stáhnete fotografie a videa. Můžete vybrat soubory mračna bodů a zobrazte náhled 3D modelu. Jednotlivé mračna můžete také sloučit. (závislé na verzi firmwaru)
5. Přepínání režimu vykreslování mračna bodů.
6. Zobrazení náhledu aktuálního mračna bodů.
7. Tlačítko přepnutí zobrazení Side-by-Side (SBS - zobrazení naskenovaného mračna bodů a vedle záběr z kamery - tak jako na obrázku výše) - Zmáčkněte tlačítko R3 na ovladači a klepnutím vyberte požadované zobrazení SBS, nebo stiskněte tlačítka R1, R2 nebo R3 a vyberte odpovídající zobrazení.
8. Stisknutím tlačítka přepínáte mezi zobrazením klasické kamery a zobrazením LiDARu - naskenovaným mračnem bodů.
Sběr dat v terénu s lidarem DJI L3 - skenování
Příprava před samotným letem je důležitá. A to jak z pohledu legislativy a omezení létání s drony, tak z pohledu uchycení a nastavení lidaru.
1. Ujistěte se, že je lidar správně nainstalován, zkontrolujte také, že jste do lidaru vložili CF Express kartu. Zapněte dron a dálkové ovládání - automaticky se mezi sebou propojí.
2. V aplikaci DJI Pilot 2 přejděte do části Camera View , vyberte typ služby RTK, zapněte ji a ujistěte se, že stav RTK je "FIX" (tedy
, vyberte typ služby RTK, zapněte ji a ujistěte se, že stav RTK je "FIX" (tedy
ne "float" ani "converging".
Upozornění
Když je signál mobilní sítě nebo dálkového ovladače slabý, použijte základnovou
stanici D-RTK 3, tím získáte vysoce přesné informace o poloze, které pomohou
při následném zpracování. Další informace naleznete v části Zpracování dat.
• Když používáte základnovou stanici RTK jiného výrobce, ujistěte se, že stanice
podporuje alespoň tři systémy GNSS a je kompatibilní pro připojení s DJI Matrice 400.
• Při nastavování základnové stanice RTK jiného výrobce postupujte při nastavení
souřadnic následujícím způsobem (na příkladu formátu RINEX):
a. Postavte základnovou stanici RTK na místo se známými souřadnicemi a zaznamenejte
souřadnice XYZ ve formátu ECEF (v případě potřeby použijte software jiného výrobce
pro převod formátu).
b. Pomocí programu Poznámkový blok otevřete soubor RINEX s příponou „.O“ a upravte
souřadnice APPROX POSITION XYZ v souboru .O na souřadnice zaznamenané v kroku „a“.
Parametry lidaru DJI L3
Před letem je potřeba nastavit parametry snímání dle informací o zájmové ploše/objektu. Možnosti a přednosti jednotlivých nastavení jsou popsány na začátku návodu.
| Počet zaznamenaných odrazů paprsku |
Čím větší je počet odrazů, tím vyšší je hustota mračna bodů. Na druhou stranu může dojít ke tvorbě nadbytečného šumu. je proto potřeba odzkoušet, kolik odrazů je pro danou snímanou plochu ideální. Let můžete opakovat s různým nastavením lidaru.
V oblastech s řídkou vegetací můžete zvolit režim s menším počtem
odrazů. |
| Vzorkovací frekvence - počet vyslaných impulzů za sekundu |
Snímkovací frekvenci doporučujeme upravit dle letových výšek dle tabulky níže.. V případě
nesprávného nastavení může dojít k zaznamenání šumu.
| Frekvence snímání lidaru a výška letu nad terénem |
Vzdálenost lidaru ke snímané ploše/objektu |
|
100 kHz <500 m
350 kHz <300 m
1000 kHz <100 m*
2000 kHz <50 m*
|
<1500 m
<430 m
<150 m
<75 m
|
* Funkce Real-Time Follow musí být povolena. |
| Obarvení mračna bodů RGB kamerou |
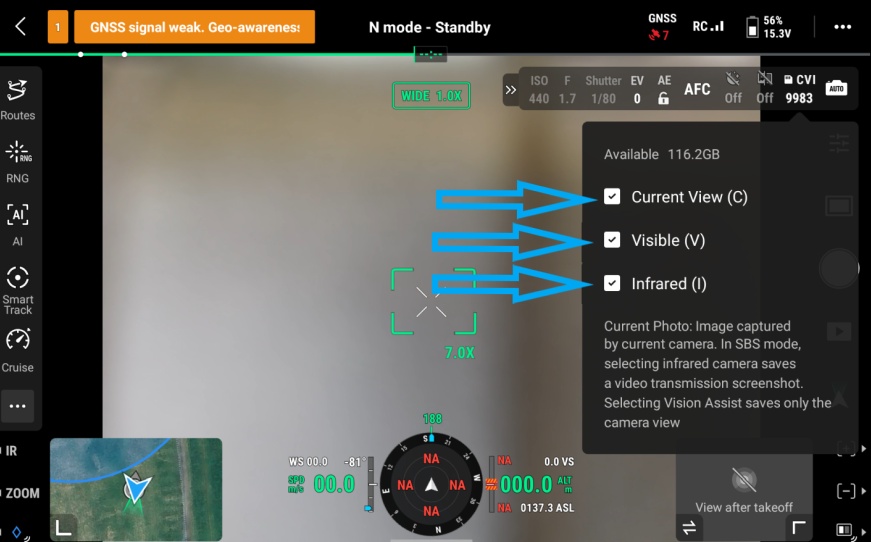
Když je tato funkce povolena, fotí se při skenování fotky - následně může uživatel obarvit mračno bodů pomocí těchto fotografií pořízených kamerou RGB (ve výchozím nastavení je toto snímání
povoleno). Pokud budete provádět skenování v noci, tak tuto funkci doporučujeme vypnout. Fotografie lze také použít pro 2D mapování a 3D modelování. |
| Režimy skenování |
Repetitive scan režim - je vhodné pro topografické mapování s vyšší přesností a pro získání rovnoměrného mračna bodů.
Star-shape repetitive scan režim - je vhodný pro lesy nebo hustá městská prostředí.
Linear repetitive scan režim - skenování dosahuje konzistentnějšího rozložení mračna bodů a je vhodný pro vysoce přesné mapování terénu.
Non-repetitive scan režim - pro sběr dat v oblasti energetiky a lesnictví použijte skenování bez opakování a získáte např. kompletnější modely kmenů stromů i stožárů elektrického vedení.
(jednou z možností jak docílit hustšího mračna bodů, je také přelétání jedné mise vícekrát se stejným, nebo rozdílným nastavením lidaru)
|
Plánování letové trasy skenování lidarem - automatický mapovací let
Pro naplánování trasy klepněte na tlačítko "Flight route" - ze základní obrazovky.

Pokud nemáme vytvořenou žádnou misi, tak se zobrazí přes celou obrazovku tlačítko "+" a tlačítko "Import Route" - postup je stejný jak ve chvíli, kdy již máme nějaké mise vytvořené (viz foto níže), tak ve chvíli, kdy žádnou misi zvolenou nemáme - tedy zvolíme "+"

Plánování trasy
Lidar DJI L3 podporuje následující typy automatických letů - wayipoint route (pro nastavení zmapování jedné linie trasy), Area route (nejčastější volba - umožňuje plošné nalétání zadané oblasti - např. průmyslové areály, pole-krajina, staveniště apod.), a poslední Linear route - optimalizované pro liniové stavby (dálnice, železnice, koridory apod.)

Důležité nastavení trasy - automatického letu
|
Parametr
|
Nastavení
|
|
Výška letové trasy
|
Výška letové trasy letového úkolu. Různé režimy výšky používají různé referenční roviny pro výšku letové trasy. Úprava výšky letové trasy ovlivní GSD a hustotu mračna bodů. Výšku lze nastavit ve 3 formátech. V základním nastavení se zadaná výška letu uvažuje tak, že v místě vzletu dron nastoupá do nastavené výšky a tu následně drží (nehledě na to, že přelétává např. údolí, nebo kopec) Toto nastavení se jmenuje "Relative to takeoff point (ALT)". V dalším nastavení, tzv. "ASL EGM96" lze nastavit výšku nad elipsoidem, poslední, nejzajímavější možnost je "AGL" kde lze nastavit po kliknutí na "DSM files", aby dron sledoval terén pomocí toho, že si stáhne satelitní výškový model pro plánovanou plochu letu. (pomocí tlačítka "Download from internet".
|
|
Rychlost letové trasy
|
Provozní rychlost dronu po vstupu do letové skenovací mise. Tato rychlost souvisí s hustotou mračna bodů a poměrem čelního překrytí. Čím rychleji dron letí, tím méně dat lidar zachytí.
|
|
Kalibrace IMU
|
Ve výchozím nastavení je zapnuto. Pokud je tato funkce zapnutá, letadlo automaticky provede kalibraci během letu. je potřeba, aby dron měl dostatek místa před sebou a za sebou, kalibrace se automaticky provádí zastavením a létáním dopředu a dozadu.
|
|
Režim účinnosti - šetření baterie
|
Při zapnutí se sníží počet kalibrací provedených za letu a celkově se provede optimalizace pro maximální šetření baterie ve dronu.
|
|
GSD
|
GSD označuje velikost jednoho měřicího bodu na snímaném povrchu a vyjadřuje tedy vzdálenost mezi jednotlivými snímanými body na zemi.
Čím větší (tzn. hodnota GSD je nižší - např. kvalitní je rozlišení GSD 1 cm/pix, naopak GSD 5 cm /pix je méně kvalitní) je hodnota GSD, tím nižší je rozlišení obrazu. Hodnota GSD ovlivní hustotu mračna bodů a letovou výšku.
Graf ukazuje odpovídající šikmou GSD (B, v centimetrech) pro různé typické letové výšky při různých horizontálních zorných polích (A, ve stupních). Když je směr horizontálního zorného pole opačný, ale úhel je stejný (tj. ±A), zůstává odpovídající šikmá GSD stejná.

|
|
Poměr bočního překrytí/poměr čelního překrytí
|
Poměr bočního překrytí je poměr překrytí dvou snímků nebo 2 skenovacích tras pořízených na dvou paralelních drahách. (Poměr čelního překrytí je poměr překrytí dvou snímků pořízených postupně ve stejném směru letové dráhy. Poměr překrytí je jedním z klíčových faktorů ovlivňujících úspěšnost pozdější vytvoření modelu.) Výchozí poměr bočního překrytí je 70 % a výchozí poměr čelního překrytí je 80 %, což je vhodné pro většinu úkolů. Pokud je mapovaná oblast převážně rovná a nemá žádné zvlnění, lze pro zlepšení provozní účinnosti poměr překrytí vhodně snížit. Když je však mapovaná oblast velmi různorodá, doporučuje se zvýšit poměr překrytí, aby byla zajištěna odpovídající kvalita modelování. *
|
*Při použití šikmého snímání budou k dispozici další dvě nastavení: Poměr bočního
překrytí (šikmé) a Poměr čelního překrytí (šikmé). Poměr překrytí šikmých fotografií
může být nižší než u ortofotografií.
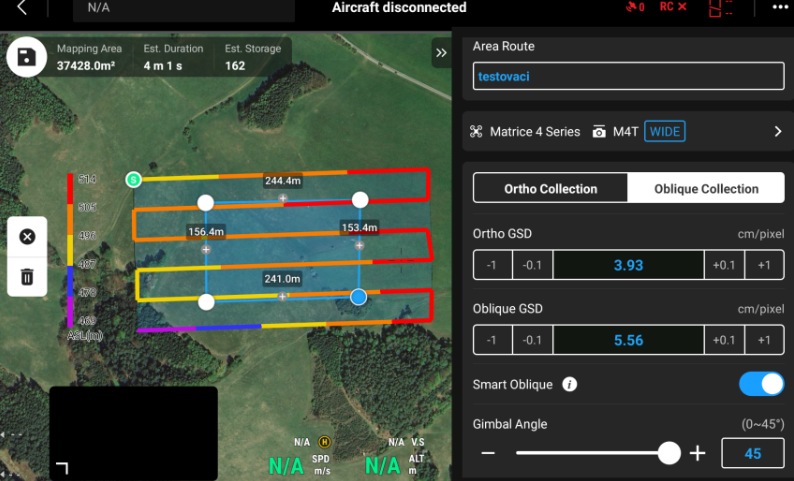
Náhled na předpokládanou kvalitu mračna před vzletem
Před provedením skenování je možné si v ovladači zobrazit rychlý náhled - odhad o počtu bodů naskenovaných na m2.
Vyberte Area Route > LiDAR Mapping > Ortho Collection, v aplikaci se zobrazí doporučené
parametry a odhadovaný výsledek mračna bodů. Uživatelé mohou předem zkontrolovat
kvalitu mračna bodů a na základě odhadu upravit parametry.
1. V panelu nastavení letové trasy klepněte na „Point Cloud Task Output Estimate“, aby se zobrazily doporučené parametry a profil hustoty mračna bodů a bodový graf generovaný na základě parametrů.
2. Když odhadovaný výsledek splňuje očekávání, použijte aktuální parametry. Když ne, upravte parametry a znovu vygenerujte odhadovaný výsledek.
Zpráva o provedené letové misi a kvalitě skenu
Po dokončení úkolu s automatickou misí se automaticky vygeneruje zpráva o kvalitě úkolu, která zobrazuje podrobné informace o úkolu. Uživatelé mohou v této zprávě označit úseky trasy s nízkou kvalitou.
K zobrazení zprávy klepněte na "View now" (Zobrazit nyní) nebo vyberte požadovanou trasu v knihovně letových tras.

- Klepnutím zobrazíte okno Upravit linii/oblast. Uživatelé mohou označit úseky letové trasy, které vyžadují nové zaměření. Označenou oblast nastavte jako mapovací oblast a vytvořte nový letový úkol.
- Klepnutím zobrazíte stav RTK, POS a RTB letové trasy.
- RTK: Zobrazí, kdy v průběhu letu byl stav RTK "fix" nebo "float" či "single", případně, pokud by RTK vykazovalo chybu, tak by se zobrazil stav "invalid". Stav "float" nebo "single" je vhodný pro PPK zpřesnění polohy.
- IMU: Klepnutím zobrazíte stav IMU při skenování v průběhu času/mise
- RTB: Klepnutím zobrazíte data základnové GNSS stanice. Když se vyskytnou jakékoli abnormální údaje, může to mít vliv na následné zpracování a jsou vyžadována dostupná data základnové stanice.
Manuální let a skenování s lidarem DJI L3
S lidarem DJI L3 je možné i skenování při manuálním letu, tedy klasickém letu řízeném ručně.
Dron naveďte do vhodné výšky a nastavte gimbal do správného úhlu. Udržujte vhodnou vzdálenost od objektu a k zajištění bezpečnosti letu zapněte systém detekce překážek.
Doporučujeme provést kalibraci IMU před a po záznamu mračna bodů. Kalibraci opakujte i během letu, když k tomu budete vyzváni. Ujistěte se však, že v oblasti kalibrace nejsou žádné překážky.
Skenování se sledováním elektrického vedení
Sledování elektrického vedení je režim pro úkoly spojené s nadzemním elektrickým vedením.
- Při předletové kontrole nastavte maximální letovou výšku, vzdálenost a povolte detekci překážek. Doporučuje se nastavit maximální letovou výšku úkolu vyšší, než je nejvyšší překážka v oblasti úkolu. Doporučuje se rovněž zrušit omezení vzdálenosti nebo nastavit vzdálenost na maximum.
- Leťte s dronem do určité výšky diagonálně nad stožárem elektrického vedení. Nastavte gimbal tak, aby byl stožár zobrazen v záběru kamery.
- Klepnutím na možnost „
 “, vytvořte úkol a nastavte parametry.
“, vytvořte úkol a nastavte parametry.
- Vyberte typ elektrického vedení. Když vybraný typ elektrického vedení neodpovídá skutečnosti, může se snížit přesnost finálních dat.
- Nastavte parametry letu. Výška dronu je určena vzhledem k nejvyššímu bodu elektrického vedení. Doporučuje se nastavit výšku podle rychlosti letu. Pro přenosové vedení se doporučuje výška 50–80 m, zatímco pro distribuční vedení se doporučuje 30–50 m.
- Nastavte parametry záznamu mračna bodů. Vzorkovací frekvence umožňuje 100 kHz a 350 kHz, doporučuje se 350 kHz. Když jsou stožáry obzvláště vysoké, použijte 100 kHz a odpovídajícím způsobem snižte rychlost letu. Režim skenování je nastaven na režim bez opakování. Když je povoleno RGB barvení, může uživatel obarvit mračno bodů pomocí fotografií pořízených RGB mapovací kamerou.
(Výsledky budou ovlivněny faktory, jako je průměr a materiál elektrického vedení nebo šířka sloupu. Doporučuje se upravit parametry podle skutečné situace.)
- Klepněte na Next a dokončete kalibrační let. Když je povolena kalibrace IMU, aplikace automaticky zobrazí identifikované elektrické vedení. Po výběru elektrického vedení akci zahájíte klepnutím na Start.
- Když dron identifikuje více elektrických vedení automaticky se vznese a v letové úloze pokračuje až když obsluha vybere jedno z nich ke sledování.
- Klepnutím na tlačítko „
 “ úkol dokončíte. Soubory s daty mračna bodů se uloží do příslušných složek. Úkol se také automaticky ukončí v následujících situacích:
“ úkol dokončíte. Soubory s daty mračna bodů se uloží do příslušných složek. Úkol se také automaticky ukončí v následujících situacích:
- Nebylo zjištěno žádné elektrické vedení.
- Je inicializován RTH.
- Je stisknuto tlačítko pozastavení letu na dálkovém ovladači.
- Je přepnut letový režim.
- Když je zjištěna překážka. Dron zabrzdí a zahájí režim vyhýbání se překážkám.
- Dron nemá spojení s dálkovým ovladačem.
- Letová výška/vzdálenost překračuje maximální limit.
- Dron se blíží k zakázaným zónám.
- Když dron nedokáže identifikovat elektrické vedení, upravte výšku a úhel gimbalu, poté to zkuste znovu.
- Když letová výška dronu nad elektrickým vedením překročí 130 m, aplikace nezobrazí AR projekci. V takovém případě snižte letovou výšku.
- Dron během letového úkolu nereaguje na pohyby páčky dálkového ovladače. Stiskněte tlačítko pozastavení letu nebo přepněte letový režim na dálkovém ovladači, opusťte úkol a dron ovládejte manuálně.
- Nezapomeňte zkontrolovat překážky kolem dronu pomocí zobrazení kamery FPV. V případě nouze okamžitě začněte řídit dron dálkovým ovladačem.
- Následující možnosti mohou vést k nepřesné identifikaci nebo abnormálnímu ukončení úkolu. V těchto případech můžete úkol ukončit manuálně.
- Více paralelních elektrických vedení v těsné blízkosti, například v blízkosti rozvoden.
- Izolované elektrické vedení.
- Elektrické vedení se nachází v blízkosti vegetace na zemi.
- Přítomnost četných dalších lineárních objektů při pohledu shora dolů, například budov, pouličních lamp a billboardů.
- Špatná viditelnost, například za deštivého nebo mlhavého počasí.
Zobrazení mračna bodů
- Během přepravy nebo skladování odpojte lidar i jinou kameru od dronu. V opačném případě se může zkrátit životnost nebo poškodit tlumicí zařízení.
- Chcete-li odstranit lidar či jinou kameru, stiskněte uvolňovací tlačítko dronu a otočte zámkem na lidaru/kameře.
Přehrávání mračna bodů
Klepnutím na položku „ “ otevřete album a stáhněte soubor mračna bodů, abyste si mohli prohlédnout 3D náhled.
“ otevřete album a stáhněte soubor mračna bodů, abyste si mohli prohlédnout 3D náhled.
Sloučení mračen bodů
Stiskněte tlačítko L3 na dálkovém ovladači, vyberte datové soubory více mračen bodů a zobrazte sloučený model na displeji přehrávání mračna bodů.
Popis struktury souboru mračna bodů
Po dokončení úkolu vypněte dron a vyjměte paměťovou kartu z Lidaru. Připojte ji k počítači a zkontrolujte soubory mračna bodů ve složce DCIM.
NEVYPÍNEJTE lidar ani nevyjímejte paměťovou kartu ihned po pořízení snímku nebo záznamu mračna bodů. Počkejte alespoň 60 sekund, aby nedošlo ke snížení přesnosti nebo poškození dat.
|
Přípona souboru
|
Popis
|
|
CLC
|
Kalibrační soubor kamery LiDAR
|
|
CLI
|
Kalibrační soubor IMU LiDAR
|
|
LDR
|
Data LiDAR
|
|
RTK
|
Data RTK hlavní antény
|
|
RTL
|
Kompenzační data tyče RTK
|
|
RTB
|
Data RTCM základnové stanice
|
|
IMU
|
Hrubá data IMU
|
|
SIG
|
Soubor podpisu PPK
|
|
LDRT
|
Data mračna bodů v reálném čase
|
|
RPT
|
Zpráva o kvalitě mračna bodů
|
Po dokončení úkolu klepněte na „ “, tím vstoupíte do alba, vyberte datové soubory a poté nahrajte výsledky mračna bodů v reálném čase do příslušného projektu v DJI FlightHub 2.
“, tím vstoupíte do alba, vyberte datové soubory a poté nahrajte výsledky mračna bodů v reálném čase do příslušného projektu v DJI FlightHub 2.
Následné zpracování dat z lidaru
Postup zpracování dat mračna bodů: Import dat > Nastavení parametrů > Spuštění modelování. Když se při sběru dat používá základnová stanice (např. DJI D-RTK), jsou pro výpočet PPK potřebná data základnové stanice odpovídající časovému období úkolu.
Ke zpracování dat jsou vyžadovány programy DJI Terra a DJI Modify. Navštivte stránku https://www.dji.com/downloads/softwares/dji-terra-4-5-0-modify, kde si můžete software stáhnout a poté nainstalovat.
Kliknutím na odkaz nebo naskenováním QR kódu zobrazíte uživatelskou příručku k softwaru, kde najdete informace o konfiguraci a použití.

https://enterprise.dji.com/ https://enterprise.dji.com/ dji-terra/downloads modify/downloads
Získání PPK dat pro korekci mračna bodů
Postupujte podle níže uvedených kroků a importujte data základnové stanice, která jsou potřebná pro následné zpracování mračna bodů.
- Vytvořte nový úkol v DJI Terra a importujte data mračna bodů, poté vyberte Local PPK a klikněte na
 k nastavení parametrů.
k nastavení parametrů.
- Klikněte na Add Base Station File (Přidat soubor základnové stanice) a importujte data základnové stanice.
- Mobilní stanice D-RTK 3: Importujte soubor .DAT odpovídající časovému období (místnímu času) úkolu.
- Základnová stanice třetí strany: Podporovány jsou soubory .oem/.obs/.rtcm. Přejmenujte soubor na název souboru .RTB v adresáři dat mračna bodů podle formátu názvu v tabulce níže a poté vyberte přejmenovaný soubor k importu. DJI Terra upřednostňuje soubory v následujícím pořadí: .oem > .obs > .rtcm.
|
Typ souboru
|
Verze
|
Typ zprávy
|
Pravidla pojmenování
|
|
OEM
|
OEM4, OEM6
|
RANGE
|
DJI_YYYYMMDDHHMM_XXX.oem
|
|
RINEX
|
v2.1x, v3.0x
|
--
|
DJI_YYYYMMDDHHMM_XXX.obs
|
|
RTCM
|
v3.0, v3.1, v3.2, v3.3
|
MSM3, MSM4, MSM5, MSM6, MSM7
|
DJI_YYYYMMDDHHMM_XXX.rtcm
|
- Vyberte horizontální a výšková souřadnicová data pro středový bod základnové stanice a nastavte souřadnice středového bodu základnové stanice.
- Spusťte výpočet, počkejte na jeho dokončení a uložte data pro modelování.
- Když byla použita mobilní stanice D-RTK, mohou uživatelé také přímo zkopírovat všechny datové soubory základnové stanice z daného dne a DJI Terra je automaticky sloučí.
- Ujistěte se, že vzdálenost mezi základnovou stanicí RTK a zařízením je menší než 15 km. V opačném případě může výpočet selhat. Další podrobnosti najdete ve zprávě DJI Terra o kvalitě.
- Další informace naleznete v příručce k mobilní stanici D-RTK.
Zpracování a export mračna bodů z Lidaru DJI L3
Data z lidaru DJI L3 zpracujete nejjednodušeji v software DJI Terra a to základně i bez licence.
Použití DJI Terra
- Vytvořte úkol
Spusťte DJI Terra, vyberte New Task > LiDAR Point Cloud.
- Importujte data
- Klikněte na tlačítko „
 “, vyberte složku pojmenovanou podle času sběru dat a importujte data mračna bodů.
“, vyberte složku pojmenovanou podle času sběru dat a importujte data mračna bodů.
- Když používáte mobilní stanici D-RTK nebo základnovou stanici jiného výrobce, postupujte podle pokynů v části „Sběr dat v terénu“ a importujte data základnové stanice.
- Nastavení parametrů
Nastavte možnosti použití a parametry podle skutečných podmínek úkolu. Další informace naleznete v uživatelské příručce DJI Terra.
- Spuštění modelování
Klepnutím na tlačítko Spustit zpracování spusťte modelování a počkejte, až bude dokončeno.
- Zobrazení výsledků modelování
Po dokončení modelování je možné v softwaru zobrazit výsledky mračna bodů a zprávu o kvalitě.
Použití DJI Modify
Díky spojení s DJI Modify je možné zpracovat výsledky mračna bodů vytvořené DJI Terra a získat tak různé výsledky mapování. Další informace naleznete v uživatelské příručce DJI Modify.
Přílohy a další informace k použití lidaru
Specifikace najdete na následující webové stránce. https://enterprise.dji.com/zenmuse-l3/specs
EXPORT PROTOKOLU
Když během provozu dojde k jakýmkoli abnormalitám, spusťte DJI Pilot 2, klepněte na HMS > Log Management a poté vyberte zařízení a soubory protokolů. Protokol můžete exportovat do dálkového ovladače pro další analýzu.
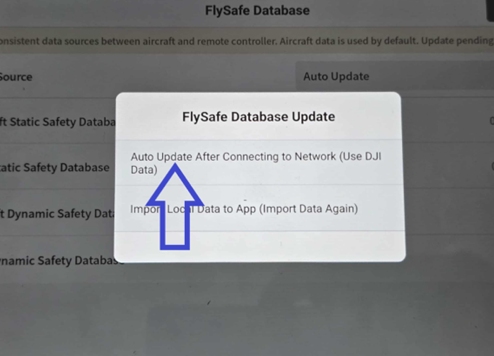
AKTUALIZACE FIRMWARU
Pomocí aplikace DJI Pilot 2 - Online aktualizace
- Zkontrolujte, zda je lidar či kamera správně nainstalována na dron. Zapněte dron a dálkové ovládání. Zkontrolujte propojení dronu s dálkovým ovladačem a připojení dálkového ovladače k internetu.
- Spusťte DJI Pilot 2. Když je k dispozici nový firmware, na domovské stránce se zobrazí výzva. Klepnutím přejděte do zobrazení Aktualizace firmwaru.
- Klepněte na Update All a DJI Pilot 2 stáhne firmware a aktualizuje zařízení.
Pomocí aplikace DJI Pilot 2 - Offline aktualizace
Offline balíček firmwaru lze stáhnout z oficiálních webových stránek DJI i na externí paměťové zařízení. Spusťte DJI Pilot 2, připojte externí paměťové zařízení, klepněte na HMS a poté na Firmware Update > Offline Update, vyberte balíček firmwaru pro dálkový ovladač, dron nebo lidar/kameru z externího paměťového zařízení a klepnutím na Update All proveďte aktualizaci.
Použití paměťové karty
- Stáhněte si nejnovější firmware z oficiálních webových stránek DJI a zkopírujte soubor do kořenového adresáře paměťové karty.
- Ujistěte se, že je lidar/kamera správně nainstalována a že je baterie dronu plně nabitá a vypnutá. Vložte paměťovou kartu do lidaru/kamery
- Zapněte dron. Lidar/kamera provede automatickou kontrolu a začne se automaticky aktualizovat. Po dokončení aktualizace firmwaru restartujte všechna zařízení.
- Před aktualizací firmwaru se ujistěte, že má zařízení dostatečné napájení.
- Během aktualizace neodstraňujte příslušenství ani nevypínejte zařízení.
- Během aktualizace je normální, že se gimbal uvolní, kontrolky dronu blikají a ESC vydává zvukový signál. Trpělivě počkejte, až se aktualizace dokončí.
- Během aktualizace firmwaru, kalibrace systému nebo konfigurace parametrů udržujte dron mimo dosah lidí a zvířat.
- Pro optimální výkon se ujistěte, že používáte nejnovější verzi firmwaru.
- Po dokončení aktualizace firmwaru se lidar/kamera automaticky restartuje a provede automatickou kontrolu.
Údržba
Skladování a přeprava
- Skladujte lidar/kameru v suchém, dobře větraném a bezprašném prostředí. Nevystavujte produkt přímému slunečnímu záření, neumísťujte ho do míst se špatnou ventilací nebo do blízkosti zdrojů tepla.
- Ujistěte se, že produkt není vystaven prostředí obsahujícímu jedovaté nebo korozivní plyny nebo materiály.
- Doporučujeme přepravovat lidar v originálním obalu. Když používáte přepravní kufr pro leteckou přepravu, vyměňte pěnovou vložku v kufru za speciální pěnovou vložku dodanou v originálním balení. Lidar umístěte podle obrázku.

- Při skladování a přepravě zacházejte s produktem opatrně. Chraňte ho před pádem a před poškozením jinými předměty.
- NEDOTÝKEJTE se povrchu objektivu kamery rukama a nedotýkejte se ho ani tvrdými předměty. Mohlo by tak dojít ke snížení kvality snímků. Povrch objektivu fotoaparátu čistěte měkkým, suchým a čistým hadříkem.
Údržba LiDARu
Prach nebo jakékoliv skvrny na optickém okénku mohou negativně ovlivnit výkon senzoru LiDAR. Když je nutné jej vyčistit, postupujte podle následujících kroků:
- Před otřením vyčistěte optické okénko stlačeným vzduchem.
- K čištění optického okénka použijte speciální vlhký hadřík na čištění čoček a otírejte ho v jednom směru. NEPOUŽÍVEJTE látky obsahující alkohol. NEOTÍREJTE okénko suchým hadříkem, protože by mohlo dojít k jeho poškrábání.
- Když skvrny přetrvávají, vyčistěte optické okénko jemným mýdlovým roztokem a poté odstraňte veškeré zbytky mýdla.
NEOTÍREJTE přímo tvrdé částečky nebo nečistoty na optickém okénku, aby nedošlo k poškrábání povrchu. To by mohlo následně negativně ovlivnit výkon LiDARu.
Korekce případných anomálií v mračnu bodů
Rekalibrace vnitřních a vnějších parametrů
Závažné chyby kalibrace mohou vést k problémům, jako jsou vrstvená mračna bodů a nepřesné podání barev. Vyberte lidar/kameru pro kalibraci.
- Sběr kalibračních dat
Ujistěte se, že v mapované oblasti je fasáda budovy a že oblast je větší než 200 m × 200 m. Pomocí funkce Area Route (Trasa oblasti) vytvořte trasu o délce přibližně 5 minut a povolte kalibraci IMU, optimalizaci výšky, barevné zobrazení RGB, Single return (jednorázový návrat) a Repetitive scanning (opakované skenování). Nastavte poměr bočního překrytí na 50 %, výšku letové trasy na 100 m a rychlost na 10 m/s. Proveďte let a shromážděte data.
- Pomocí DJI Terra exportujte kalibrační soubor
Pomocí aplikace DJI Terra (v5.1.0 nebo novější) vytvořte úlohu zpracování mračna bodů LiDAR, importujte kalibrační data shromážděná v kroku 1 a vyberte Kalibrace LiDAR. Po dokončení zpracování klikněte na Exportovat kalibrační soubor. Vygenerovaný kalibrační soubor typu .tar je v projektové složce lidars/terra_lidar_cali. Doporučujeme zkontrolovat, zda data mračna bodů nemají nějakou chybu, třeba vrstvení nebo nepřesné vykreslení barev. Když se vyskytne chyba, opakujte kroky 1 a 2. Když se žádné problémy nevyskytnou, pokračujte krokem 3.
- Kalibrace lidaru nebo kamery
Zkopírujte kalibrační soubor do kořenového adresáře paměťové karty a poté kartu vložte do lidaru/kamery. Nainstalujte lidar/kameru na dron, zapněte dron a počkejte asi 5 minut, než se kalibrace dokončí.
- Kontrola výsledku
Po dokončení kalibrace vyjměte paměťovou kartu, připojte ji k počítači a zkontrolujte soubor protokolu ve formátu .txt. Kalibrace je úspěšná, když se zobrazí hlášení All succeed. Uživatelé mohou také udělat záznam dat mračna bodů, aby zkontrolovali, zda je aktualizován časový parametr souboru .CLI.
Obnovení továrního nastavení
Když výsledky kalibrace nejsou uspokojivé, lze vnitřní a vnější parametry obnovit na výchozí nastavení, a to podle následujících kroků.
- Vytvoření obnovovacích souborů
- Obnovení souboru .CLI: Vytvořte nový soubor .txt a pojmenujte jej clear_user_extri_params.txt.
- Obnovení parametrů kamery: Vytvořte nový soubor .txt a pojmenujte jej reset_cali_user.txt. Otevřete soubor a zadejte sériové číslo lidaru, které má být resetováno, a to ve formátu: XXXXXXXXXXXXXX. Sériové číslo najdete v souboru .CLI ve složce úkolů nebo v aplikaci mezi informacemi o verzi zařízení.
- Import souborů
Zkopírujte soubor .txt do kořenového adresáře paměťové karty a poté kartu vložte do lidaru. Nainstalujte lidar na dron, zapněte dron a počkejte asi 5 minut, než se dokončí kalibrace.
- Nahrajte data mračna bodů a vyjměte paměťovou kartu z lidaru, poté ji připojte k počítači a zkontrolujte soubor protokolu ve formátu .txt. Obnova je úspěšná, když se zobrazí hlášení „All succeed“. Je také možné zkontrolovat, zda je časový parametr souboru .CLI obnoven na výchozí nastavení.
Vyloučení odpovědnosti
Pečlivě si prosím přečtěte pokyny v této uživatelské příručce. Při používání produktu a jeho příslušenství je nezbytné se seznámit se všemi instrukcemi.
Za provoz tohoto i jiného zakoupeného produktu a následky spojené s jeho provozem je plně odpovědný její uživatel. Výrobce dronů, DJI Enterprise, ani distributor TotalData s.r.o. nenesou žádnou odpovědnost za nesprávný provoz produktu, za škody vzniklé v souvislosti s jeho provozem, zranění, pokuty nebo jinou právní odpovědnost, přímou či nepřímou, vzniklou během provozu produktu nebo při používání jeho příslušenství.
Před každým použitím se ujistěte, že je produkt a jeho příslušenství v dobrém stavu a že správně pracují. Pokud jeví známky poškození, okamžitě ukončete jejich provoz.





 a následně se zobrazí menu s cca 8 položkami - krok 4
a následně se zobrazí menu s cca 8 položkami - krok 4
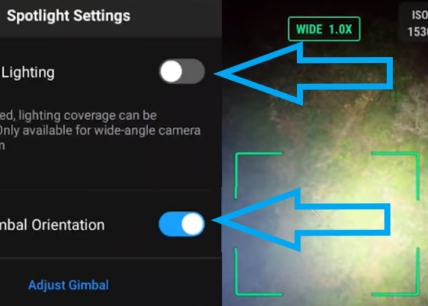
 , na kterou klikneme a následně se zobrazí menu, kterém si můžeme vybrat z nastavení světel (krok 5):
, na kterou klikneme a následně se zobrazí menu, kterém si můžeme vybrat z nastavení světel (krok 5): 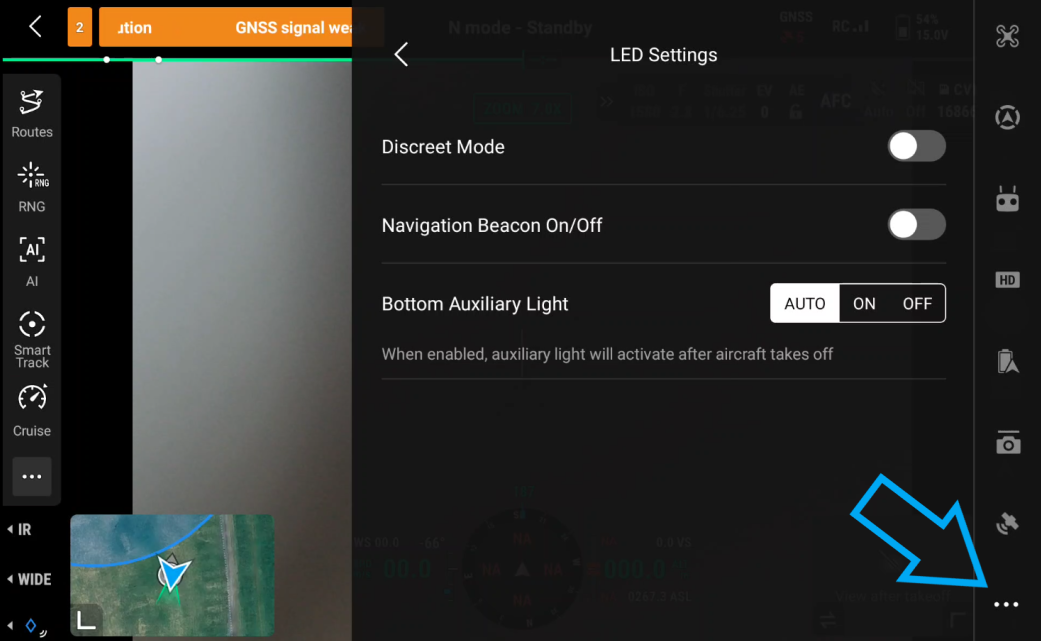

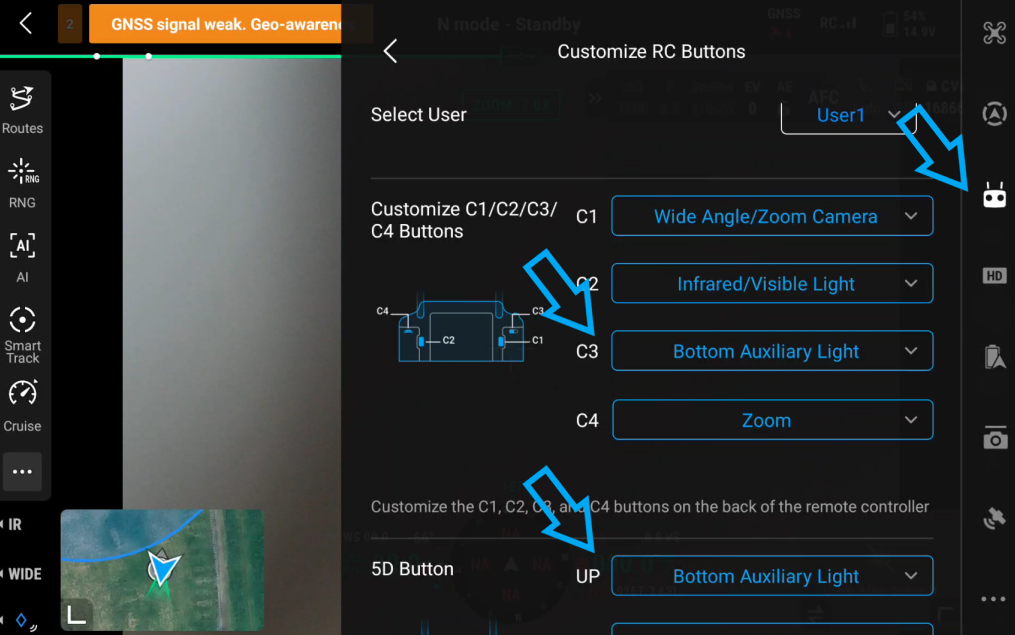






 a následně přepneme přepínač do polohy zapnuto.
a následně přepneme přepínač do polohy zapnuto.